Uart
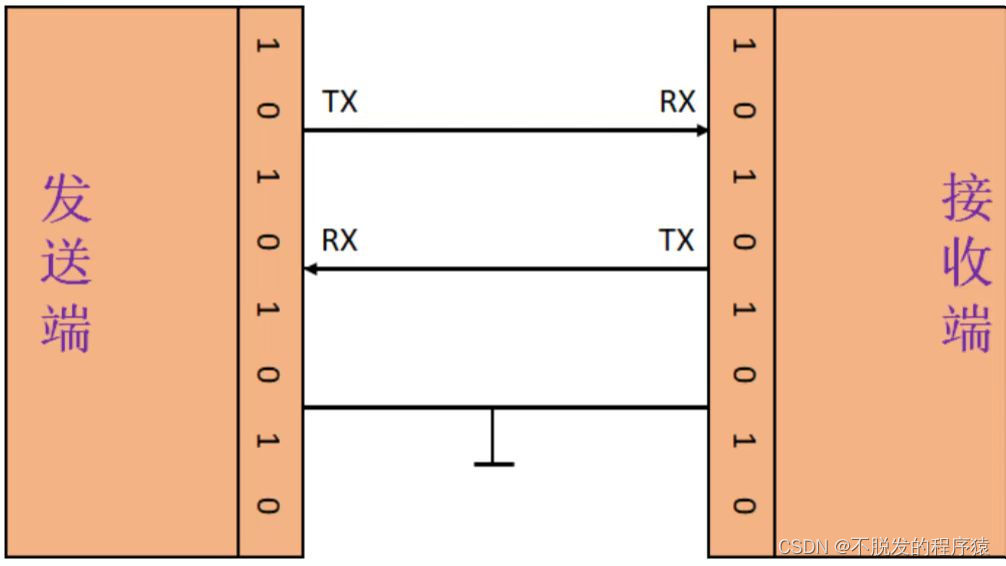
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发器)是一种双向、串行、异步的通信总线,仅用一根数据接收线和一根数据发送线就能实现全双工通信。典型的串口通信使用3根线完成,分别是:发送线(TX)、接收线(RX)和地线(GND),通信时必须将双方的TX和RX交叉连接并且GND相连才可正常通信,如下图所示:
串口是与机器相关的,因此不同的机器串口的配置不同,一般来说,串口的各个寄存器位宽都是1,但是在vf2上,位宽为4,但是读出来的数据仍然按照1个字节处理。
UART 接口不使用时钟信号来同步发送器和接收器设备,而是以异步方式传输数据。发送器根据其时钟信号生成的位流取代了时钟信号,接收器使用其内部时钟信号对输入数据进行采样。
同步点是通过两个设备的相同波特率(UART和大多数串行通信一样,发送和接收设备需要将波特率(波特率是指信息传输到信道的速率)设置为相同的值。对于串行端口,设定的波特率将用作每秒传输的最大位数)来管理的。
如果波特率不同,发送和接收数据的时序可能会受影响,导致数据处理过程出现不一致。允许的波特率差异最大值为10%,超过此值,位的时序就会脱节。
常见的串口设备寄存器布局如下所示:
| Base Address | DLAB | I/O Access | Abbrv. | Register Name |
|---|---|---|---|---|
| +0 | 0 | Write | THR | Transmitter Holding Buffer |
| +0 | 0 | Read | RBR | Receiver Buffer |
| +0 | 1 | Read/Write | DLL | Divisor Latch Low Byte |
| +1 | 0 | Read/Write | IER | Interrupt Enable Register |
| +1 | 1 | Read/Write | DLH | Divisor Latch High Byte |
| +2 | x | Read | IIR | Interrupt Identification Register |
| +2 | x | Write | FCR | FIFO Control Register |
| +3 | x | Read/Write | LCR | Line Control Register |
| +4 | x | Read/Write | MCR | Modem Control Register |
| +5 | x | Read | LSR | Line Status Register |
| +6 | x | Read | MSR | Modem Status Register |
| +7 | x | Read/Write | SR | Scratch Register |
UART芯片共有12个不同的寄存器,映射到8个不同的端口I / O位置。12 个功能对应8个寄存器,这意味着有多个寄存器使用相同的端口 I/O 位置,并影响 UART 的配置方式。实际上,其中两个寄存器实际上是相同的。在寄存器中写入0/1,用户触发的读取/写入是两种不同的操作,可以被系统感知到。
中断配置寄存器Interrupt Enable Register (IER)布局如下:
| Bit | Notes |
|---|---|
| 7 | Reserved |
| 6 | Reserved |
| 5 | Enables Low Power Mode (16750) |
| 4 | Enables Sleep Mode (16750) |
| 3 | Enable Modem Status Interrupt |
| 2 | Enable Receiver Line Status Interrupt |
| 1 | Enable Transmitter Holding Register Empty Interrupt |
| 0 | Enable Received Data Available Interrupt |
通常我们只会开启接收数据中断。
线路状态寄存器Line Status Register (LSR)的布局如下:
| Bit | Notes |
|---|---|
| 7 | Error in Received FIFO |
| 6 | Empty Data Holding Registers |
| 5 | Empty Transmitter Holding Register |
| 4 | Break Interrupt |
| 3 | Framing Error |
| 2 | Parity Error |
| 1 | Overrun Error |
| 0 | Data Ready |
此寄存器主要用于根据收到的数据提供有关UART中可能存在的错误。通常,我们会关注 Empty Data Holding Registers和 Data Ready两个位以判断是否可以读取/写入数据。
在大多数机器中,串口设备已经在BIOS/SBI中被初始化完成,如果没有必要,我们在OS中将没有必要再次对其进行初始化,因此在内核代码中,我们只需要打开uart的中断即可。当然不排除一些OS会直接运行在无SBI/BIOS的环境中,这种情况下,确实需要对串口设备进行初始化。
在不同的设备上,可能附带着不同的串口设备,一般来说,主要的差一点在于寄存器的宽度不一样,但即使宽度不一样,在读取或者写入时我们仍然按照单个字节有效进行编程,这些不同的寄存器宽度一般是为了读写对齐而已。
| 平台 | 串口设备 | 寄存器宽度 |
|---|---|---|
| qemu | uart16550 | 1 |
| visionfive2 | uart8250 | 4 |
| unmatched | uart16550 | 1 |
为了完成各个平台的串口初始化,我们实现了两个uart驱动:对于uart8250,我们可以设置寄存器宽度。
/// The UART 8250 driver.
pub struct Uart8250Raw<const W: usize> {
base: usize,
}
/// The UART 16550 driver.
pub struct Uart16550Raw(usize);
对于两种驱动,都实现了相同的函数:
impl Uart {
/// Initialize the UART.
///
/// It will enable receive interrupts.
pub fn init(&self) {}
/// Write a byte to the UART.
pub fn put(&mut self, c: u8);
/// Read a byte from the UART. If there is no data, return `None`.
pub fn read(&mut self) -> Option<u8>;
}
init用于用户开启接收中断,方便在内核实现异步串口输入输出put会向串口输出一个字符,我们不会开启输出中断,因此这里会轮询是否可以输出read会读取一个字符,当串口中没有数据可以读取时,返回None
在内核中,我们需要实现任务的异步等待机制,要做到模块化,上面实现的这两个驱动就无法完成任务等待的功能,因为驱动如果想获取内核的任务定义,调度函数等会变得麻烦并且增大了耦合性,因此我们将上面这两个驱动定位为低级驱动,我们将在内核中通过更高级的抽象,完成任务异步等待机制。
由于这两个驱动没有使用trait进行约束(后续修改掉,很简单),但是它们两的函数又是一样的,因此在内核中我们定义了一个trait将其进行统一:
pub trait LowUartDriver: Send + Sync {
fn _init(&mut self);
fn _put(&mut self, c: u8);
fn _read(&mut self) -> Option<u8>;
}
而为这两个底层驱动实现这个trait只需要调用相同后缀的函数即可。
为了完成任务异步等待,我们在高级驱动中定义了任务队列:
pub struct Uart {
inner: Mutex<(Box<dyn LowUartDriver>, UartInner)>,
}
struct UartInner {
rx_buf: VecDeque<u8>,
wait_queue: VecDeque<Arc<Task>>,
}
为串口设备定义的trait为:
pub trait UartDevice: Send + Sync + DeviceBase {
fn put(&self, c: u8);
fn get(&self) -> Option<u8>;
fn put_bytes(&self, bytes: &[u8]);
fn have_data_to_get(&self) -> bool;
fn have_space_to_put(&self) -> bool;
}
put与底层驱动的put功能相同get与底层驱动的get功能相同,但是当没有字符时,任务会被放入等待队列中put_bytes用于一次输出多个字符have_data_to_gethave_space_to_put用于实现文件的poll/select机制
串口设备最终会被封装为stdio stdin文件用于输入和输出。